



全源融合時空智能敏捷開發平臺
S1-16R4配16線激光雷達,4目環視相機



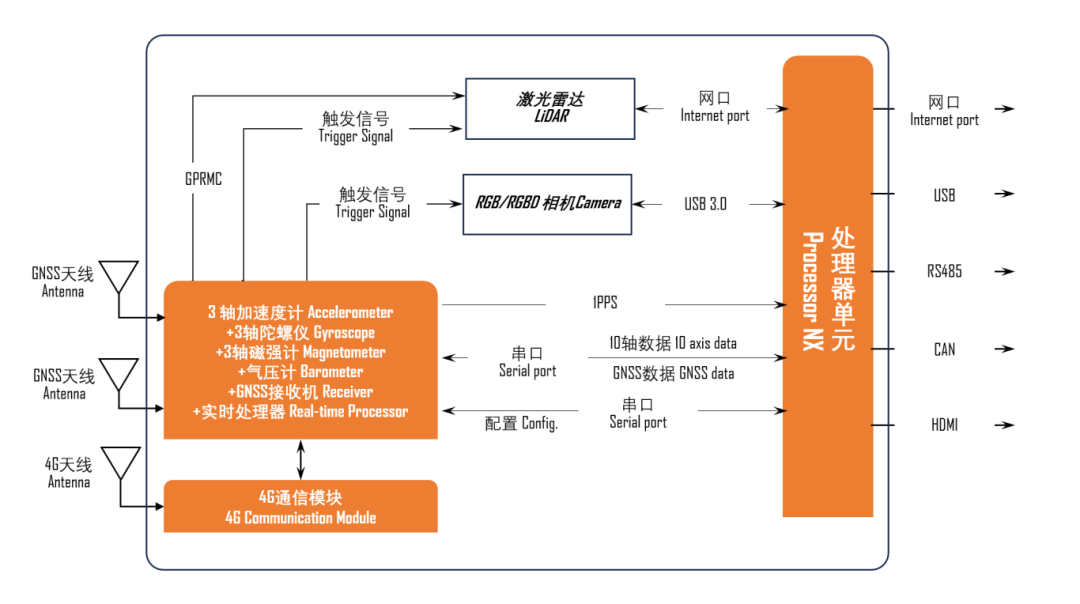
S1系列 是一款專為移動機器人或智能移動體打造的高性能時空智能開發平臺。它通過高度集成RGB相機、激光雷達、雙天線差分GNSS以及IMU等眾多位置感知傳感器,並採用基於1PPS的精密時間同步機制,解決了多傳感器數據融合中常見的時空對齊難題。
S1的所有數據均以ROS節點形式輸出,提供了給各層次用戶即插即用的體驗。研究人員和開發者無需在複雜的硬件集成、標定和同步問題上耗費時間,可以立即將S1系列作為主要感知單元,快速投入到多傳感器融合SLAM、高精度三維測繪以及全源融合導航等前沿項目的算法開發中,極大地提升了研發效率。
PART01
特點
● 多傳感器集成:
在一個硬件平臺上集成了四攝像頭、LiDAR、雙天線GNSS(帶RTK)和10軸IMU;
● 精細時間同步:
具有1PPS脈衝的硬件級同步;
即使在GNSS弱化的環境中,也通過內部觸發器保持定時精度;
消除時間戳漂移,實現可靠的多傳感器融合;
● 無縫RTK定位:
內建4G通訊單元;
具有匹配基站的一鍵式RTK;
網絡CORS RTK配置;
● ROS兼容架構:
本機ROS節點集成;
與主要SLAM框架(LIO-SAM、VINS Fusion等)即插即用;
無需底層驅動程序開發;
● 靈活的開發選項:
具有可定製組件的標準化設計;
支持特定需要的硬件修改;
● 綜合開發支持:
詳細的傳感器校準指南;
定期更新傳感器融合技術和優化策略;
經測試的主流開源算法Docker鏡像與手冊;
PART02
產品架構
PART03
應用範圍

PART04
規格參數

 列表
列表