



全源融合时空智能敏捷开发平台
S1-16R4配16线激光雷达,4目环视相机



S1系列 是一款专为移动机器人或智能移动体打造的高性能时空智能开发平台。它通过高度集成RGB相机、激光雷达、双天线差分GNSS以及IMU等众多位置感知传感器,并采用基于1PPS的精密时间同步机制,解决了多传感器数据融合中常见的时空对齐难题。
S1的所有数据均以ROS节点形式输出,提供了给各层次用户即插即用的体验。研究人员和开发者无需在复杂的硬件集成、标定和同步问题上耗费时间,可以立即将S1系列作为主要感知单元,快速投入到多传感器融合SLAM、高精度三维测绘以及全源融合导航等前沿项目的算法开发中,极大地提升了研发效率。
PART01
特点
● 多传感器集成:
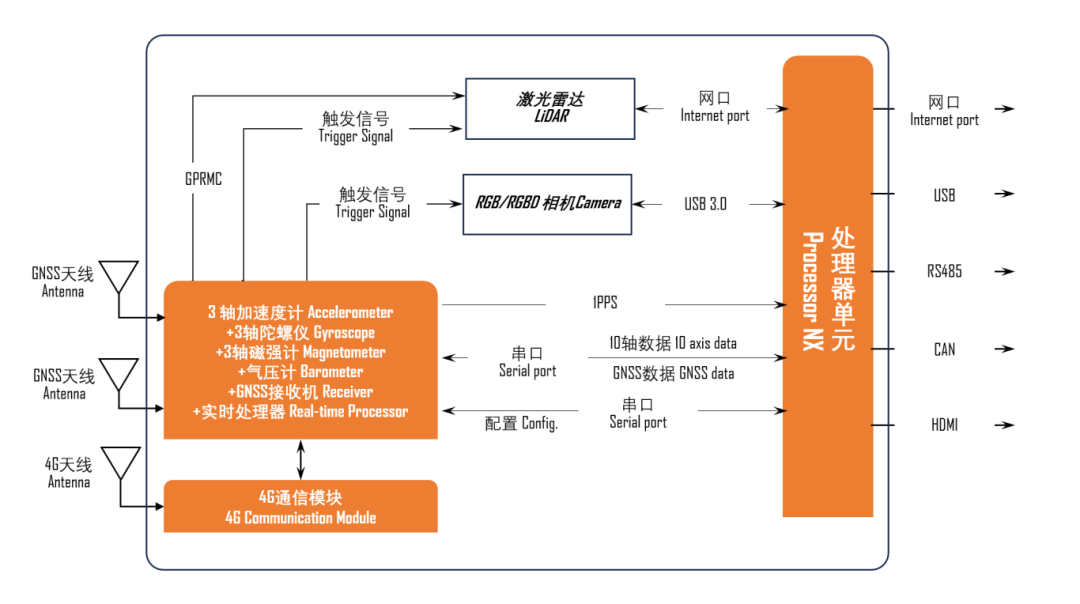
在一个硬件平台上集成了四摄像头、LiDAR、双天线GNSS(带RTK)和10轴IMU;
● 精细时间同步:
具有1PPS脉冲的硬件级同步;
即使在GNSS弱化的环境中,也通过内部触发器保持定时精度;
消除时间戳漂移,实现可靠的多传感器融合;
● 无缝RTK定位:
内建4G通讯单元;
具有匹配基站的一键式RTK;
网络CORS RTK配置;
● ROS兼容架构:
本机ROS节点集成;
与主要SLAM框架(LIO-SAM、VINS Fusion等)即插即用;
无需底层驱动程序开发;
● 灵活的开发选项:
具有可定制组件的标准化设计;
支持特定需要的硬件修改;
● 综合开发支持:
详细的传感器校准指南;
定期更新传感器融合技术和优化策略;
经测试的主流开源算法Docker镜像与手册;
PART02
产品架构
PART03
应用范围

PART04
规格参数

 列表
列表